ROS 2 感知节点加速应用
by: Xilinx, Inc
ROS 2 感知节点加速应用实现了 image_pipeline 子集。 这是 ROS 2 生态系统中最受欢迎的封装之一,也是 ROS 感知堆栈的重要组成部分。创建一个简单的计算图,包括两个硬件加速节点、Resize & Rectify,然后使用 KRS 框架来实现跟踪和基准测试。 获取提供该加速应用的通知。

特性:
- ROS 2 感知堆栈加速
- 提供迹线和基准功能
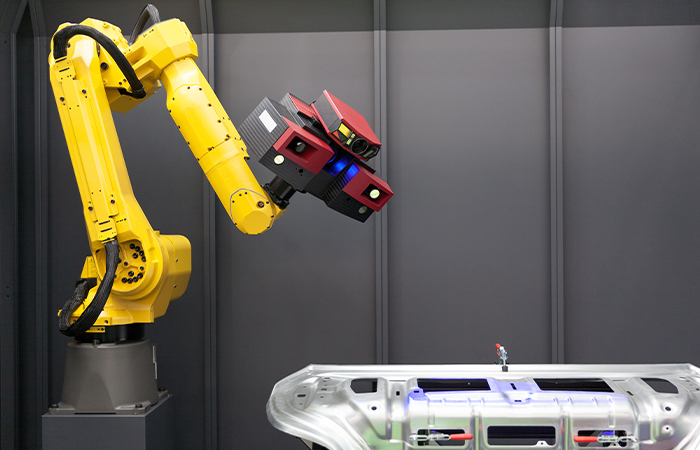
- 使用 Gazebo 进行相机模拟
- 支持各种 ROS 2 摄像机作为图像源
所需硬件:
- Kria™ KR260 机器人入门套件
- 以太网电缆
- Ubuntu 20.04 工作站
- ROS 2 相机模块(可选)
其他工具和资源
常见问题解答
否,该应用不需要任何 FPGA 设计经验。
此应用由 Xilinx 免费提供。
否,对于此应用,这并不是必不可少的。默认情况下,此应用使用 Gazebo 进行摄像机模拟。尽管它支持各种 ROS 2 摄像机,但使用真实摄像机是可选的。
主要资料





使用自适应计算加速您的 AI 边缘解决方案
了解有关自适应 SOM 的所有信息,以实例解释了自适应 SOM 为什么适合下一代边缘应用,以及如何在下一代边缘应用中部署自适应 SOM。本书还强调了智能视觉提供商如何从只有自适应 SOM 才能实现的性能、灵活性及快速开发等优势中获益。

机器人自适应计算
对机器人的需求正在迅速增长。构建一款既安全又能与人一起工作的机器人已经够难了。还要让这些技术协同工作,则更具挑战性。更复杂的是,机器学习和人工智能的加入,增加了满足计算需求的难度。机器人专家正在转而采用自适应计算平台,其可在一个适应未来、可扩展的自适应集成型平台上实现内建的安全保障,从而可提供低时延、确定性的多轴控制。参阅 eBook,了解更多信息。