机器人
多坐标、视觉引导安全智能机器人的模块化平台
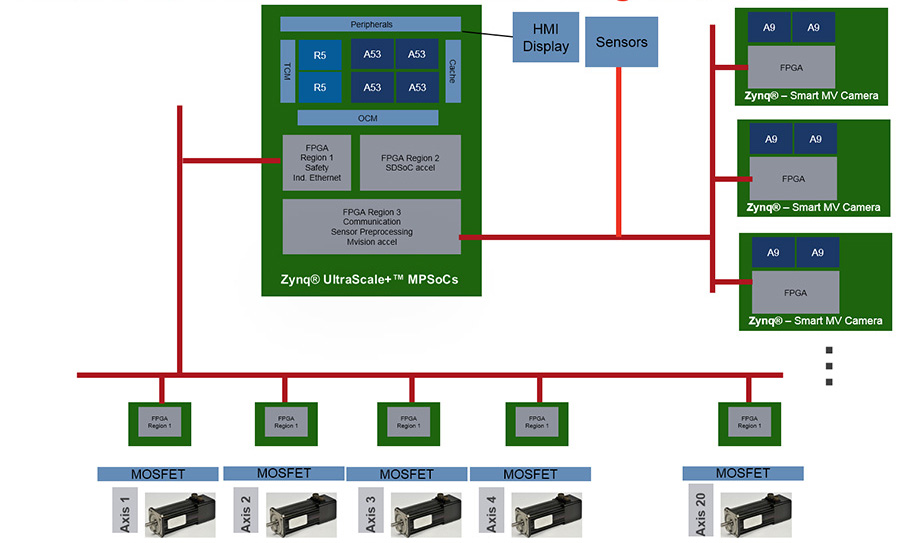
机器人是工业自动化系统的最终表现。工业控制、通信、机器视觉、机器学习、人机界面、网络安全和安全可能是在构建合作机器人、工业机器人或机器人的其它商业应用时需要考虑的关键技术。 Xilinx 自适应 SoC、FPGA 和 Versal ACAP 可为机器人实现模块化方法,其提供可重复使用并可扩展的通用嵌入式软硬件平台,显著缩短上市时间、缩小外形,降低总体拥有成本,同时还可最大限度提高这些资产的智能性和适应性。Xilinx 自适应 SoC、FPGA 和 Versal ACAP 支持:
- 通过控制环路的并行处理,对可扩展的运动轴数量进行精确确定性控制
- 通过多种工业以太网标准进行连接,包括支持有时间限制的联网 (TSN)
- 支持多种不同的传感器输入,可实现传感器融合和高层次传感器技术
- 实时分析和机器学习支持预测性维护控制、远程诊断、数字“双胞胎”以及更多的端点智能使用案例
- 集成人机接口 (HMI)
- 符合 IEC 61508 SIL 3 功能安全以及 IEC 62443 网络安全
- 通过最高层次的集成,缩小物理尺寸并降低功耗
Xilinx Versal AI Edge 是一个异构平台,可为机器人提供可扩展的模块化方法,以实现对所有事物的控制、感知、导航、自主学习与安全保护。

Versal AI Edge 及其灵活应变的引擎在机器人中的优势:
- 感知是提供信息,以适应环境的技术,灵活应变的引擎中的传感器融合加速器将卸载应用处理器的负载
- 灵活应变的引擎执行低时延电机控制和确定性联网,以实现整个系统的同步
- 灵活应变的引擎可加速动作规划,充分满足导航需求
- 智能引擎不仅可执行 AI,增强对动态执行的安全控制,而且还可通过机器学习加速实时分析,以实现预测性维护
- Versal 针对最新标准内建从上到下的整个安全与安防系统 — Xilinx 可为保护系统和安全系统提供简化的认证路径
| 设计范例 | 说明 | 器件支持 |
|---|---|---|
 点击放大 |
全面集成的机器人控制
多轴运动控制
支持最低驱动能力和安全性的多轴功率级
机器视觉相机
|




有些工业和医疗保健物联网产品需要用到 Xilinx IIoT 和 HcIoT 解决方案堆栈的所有模块,所有的产品都或多或少会用到一些模块。Xilinx IIoT 和 HcIoT 解决方案堆栈包括 Xilinx 及生态系统的构建块,其可在整个工业和医疗物联网平台间使用。使用 xilinx 工业和医疗保健物联网系统,您不一定要从零开始。探索 Xilinx IIoT 和 HcIoT 解决方案堆栈的不同元素,不仅可最小化开发时间和开发成本,而且还可最大化在您的新一代工业和医疗保健物联网平台上对设计的重复使用。



{kind=link}